
How Subsea BOP Control Systems Work in Deepwater and Ultra-Deepwater Drilling
Key Questions Answered in This Article
What controls total BOP closing time in deepwater drilling operations?
How do multiplex and hydraulic pilot systems compare in ultra-deepwater?
Why does water depth significantly affect hydraulic execution time?
When is a fast-response hydraulic system technically sufficient?
How should riser-integrated hydraulic conduits be configured for deepwater wells?
1. Deepwater Subsea BOP Control System Architecture
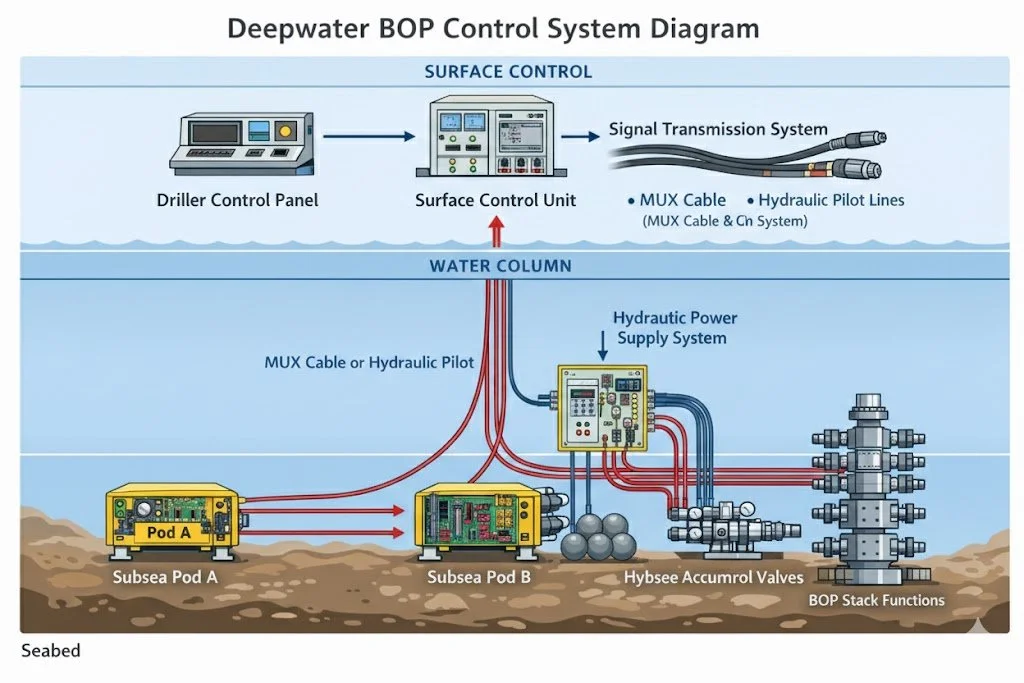
A deepwater BOP control system provides the operational link between surface command inputs and subsea hydraulic actuators through an integrated network of signal transmission and stored hydraulic energy. Its design includes the following components and ensures reliable command execution despite long distances, high pressures, and harsh subsea conditions.
Surface Control Unit (SCU) – Translates driller commands into encoded electrical or hydraulic pilot signals. It also manages system diagnostics, redundancy logic, and power distribution to maintain continuous and reliable control.
Transmission Medium (MUX Cable or Hydraulic Pilot Lines) – Carries control signals from the surface to the subsea control pods. System response and efficiency depend on water depth, transmission technology, and overall system configuration.
Dual Subsea Control Pods (Pod A / Pod B) – Provide built-in redundancy by containing solenoid valves, pilot valves, pressure regulators, and signal-decoding electronics. Either pod can operate the BOP functions independently if the other becomes unavailable.
Hydraulic Power Supply System – Supplies pressurized hydraulic fluid through rigid conduits or hose umbilicals to operate BOP components such as rams, annular preventers, and connector systems.
Subsea Accumulators – Store high-pressure hydraulic energy close to the BOP stack, minimizing actuation delay and improving response speed and operational reliability.
A conceptual diagram of different components of the BOP control system is shown below:
2. Deepwater BOP Response Time: Signal Time vs Hydraulic Execution Time
Total response time consists of two independent components that must be optimized together.
Signal Transmission Time – The time required for the control command to reach the subsea pod. Electrical multiplex signals are nearly instantaneous, while hydraulic pilot signals slow with depth.
Hydraulic Execution Time – The time required for pressurized fluid to move an actuator from fully open to fully closed. This depends on pressure, conduit size, and flow restrictions.
Total Response Time = Signal Time + Execution Time
Deepwater optimization focuses on minimizing both components to achieve the required disconnection time.
3. Multiplex vs Hydraulic BOP Control Systems in Deepwater
A faster response is critical in deepwater drilling because the large distance between the rig and the BOP stack increases the time required to activate well-control equipment. Rapid actuation is essential for timely well shut-in, dependable execution of emergency disconnect sequences (EDS), and safe response during vessel drive-off or adverse environmental conditions. As water depth increases, predictable response time becomes a key element of overall system reliability.
3.1 Conventional Hydraulic Pilot Systems
Conventional hydraulic pilot systems transmit control commands as pressure pulses from the surface to subsea valves through dedicated hydraulic hoses. The signal travels through a continuous column of hydraulic fluid, and system performance is therefore strongly influenced by water depth and line characteristics.
Signal delay increases with water depth because pressure waves must travel through long, compressible fluid columns.
Hose expansion under pressure (“ballooning”) absorbs transmitted energy, increasing response lag.
Friction losses along extended hydraulic lines gradually dampen signal sharpness, reducing command precision over long distances.
While simple and mechanically reliable, these systems become progressively slower as depth increases. They remain suitable for moderate water depths or anchored rig operations where additional response time does not significantly affect well control or disconnection safety margins.
3.2 Fast-Response Hydraulic Systems for Deepwater Wells
Fast-response hydraulic systems were developed to reduce transmission delays by maintaining pilot lines at a constant baseline pressure, allowing commands to be delivered more rapidly and consistently.
In these systems, pilot lines remain continuously pre-pressurized rather than returning to low pressure after each command. Baseline pressure is maintained through regulated hydraulic charging circuits supported by pressure regulators, check valves, and accumulator backup, which compensate for minor pressure losses and stabilize standby pressure.
Pre-pressurized pilot lines reduce fluid compressibility effects and limit hose expansion.
Smaller pressure variations are needed to transmit commands, shortening signal stabilization time.
Improved signal clarity results in faster and more predictable subsea valve response.
Under moderate deepwater conditions, performance can approach that of multiplex systems.
Despite these improvements, hydraulic systems still rely on physical fluid movement to actuate equipment. At extreme water depths, hydraulic execution time becomes the dominant limitation.
3.3 Multiplex Electro-Hydraulic (MUX) Systems for Ultra-Deepwater
Multiplex electro-hydraulic (MUX) systems overcome hydraulic transmission delays by sending encoded digital commands electrically from the surface to subsea control pods.
Electrical signal transmission provides near-instantaneous command delivery regardless of water depth.
Two-way communication enables confirmation of command receipt and execution, reducing the risk of unintended or incomplete activation.
Reduced conductor count improves cable reliability compared with earlier direct-current control systems.
Hydraulic power is still used subsea for physical actuation, but electrical communication eliminates the long-distance signal lag inherent in hydraulic pilot systems. For this reason, multiplex systems have become the industry standard for deepwater and ultra-deepwater drilling, where rapid, reliable control response is essential for both well control and emergency operations.
4. Optimizing Hydraulic Response in Deepwater BOP Systems
The speed and reliability of hydraulic actuation in deepwater drilling are largely determined by fluid flow behavior and the physical configuration of the hydraulic delivery system. Since hydraulic power must travel long distances from surface supply systems to subsea equipment, even small design inefficiencies can introduce measurable delays. Deepwater BOP control systems are therefore engineered to minimize energy losses and ensure predictable pressure delivery to critical functions.
Key design considerations include:
Larger internal-diameter conduits
Increasing the internal diameter of hydraulic lines reduces fluid velocity at a given flow rate, thereby lowering friction losses along the conduit walls. Reduced friction allows pressure to build more quickly at subsea actuators, improving the speed of ram closures, annular operations, and connector functions.Riser-integrated rigid conduits
Rigid steel conduits integrated into the marine riser provide a more stable hydraulic pathway than flexible hoses. Flexible hoses tend to expand slightly under pressure, a phenomenon known as ballooning, which absorbs hydraulic energy before it reaches the actuator. Rigid conduits eliminate this effect, resulting in more direct pressure transmission, improved response consistency, and reduced signal lag, particularly in deepwater applications.Simplified flow paths with minimal restrictions
Each bend, fitting, valve restriction, or sudden change in flow direction introduces turbulence and localized pressure losses. By minimizing sharp elbows, unnecessary connections, and restrictive components, system designers reduce energy dissipation and maintain smoother fluid flow.Monitoring subsea pressure rise time
Measuring how quickly pressure builds at subsea locations during function testing provides a practical verification of system performance. Pressure rise time confirms whether the actual hydraulic response matches design calculations and modeled expectations. Continuous monitoring also helps identify developing issues such as partial blockages, fluid degradation, internal leakage, or conduit restrictions before they affect operational reliability.
For critical well-control functions, deepwater systems typically employ 2–2½-inch rigid conduits. The larger diameter and structural rigidity reduce hydraulic delay, improve pressure stability, and ensure consistent actuation performance factors that are essential when rapid and reliable BOP response is required under deepwater operating conditions.
Frequently Asked Questions (FAQ)
Q1: Is multiplex mandatory in ultra-deepwater drilling?
Multiplex systems are not always explicitly mandatory, but they are strongly preferred and widely adopted in ultra-deepwater and dynamically positioned (DP) operations. Electrical signaling provides near-instant command transmission and confirmation feedback, which is essential for emergency disconnect sequences where timing margins are very tight.
Q2: Why is rigid conduit superior to hose supply lines?
Rigid conduit improves hydraulic performance by eliminating hose expansion (“ballooning”), which otherwise absorbs energy and delays pressure buildup. With a stable internal volume and reduced energy loss, rigid lines provide faster pressure rise, more consistent response, and improved reliability in deepwater applications.
Q3: Can fast-response hydraulics replace multiplex systems?
Fast-response hydraulic systems can perform effectively at moderate water depths by reducing compressibility effects through pre-pressurized pilot lines. However, they still depend on fluid movement and must be validated through disconnect and response-time modeling. In ultra-deepwater operations, multiplex systems generally remain the preferred solution due to faster and more predictable response.